Build BOTS!
Make a Passive Dynamic Robot Walker
This bipedal (two-legged) walker works something like a human. Roboticists call these types of robot models passive-dynamic walkers because they don’t use motors or electricity.
Can you figure out what makes the robot go?
Notice how the robot moves as it goes along the test ramp. Why does it move that way?
This robot has foam on the bottom of its feet, kind of like the sole of your sneakers. What does the foam do?
What else do you notice about its design that helps it move? What could you fix if it wasn’t moving straight (or wasn’t moving at all)?




Instructions










Step 1: Legs and Feet
Fold the leg in half to double the thickness.
Use the glue stick to glue the layers together, from the middle of the leg to the foot.
Use the hole puncher to make a hole in the top of each leg.
Bend the feet out with the toes showing. One should go left and the other should go right.
Step 2 – Foam and Sticks
Turn a piece of peel-and-stick foam over so the backing paper is up. Trace around each foot with a pencil. Cut out the pieces of foam and stick one on the bottom of each foot.
Glue a mini craft stick on top of each foot so it touches the leg. Make it a little longer in the back.
Stick a foam sock on the outside of each leg.
Step 3 - Beads
Slide a large bead onto the middle of the rod. Draw a face on it.
Slide the feet on the rod, with the toes facing the same way.
Slide medium beads on the other side of the legs. These are shoulders that hold the legs in place.
If the medium beads are sliding around, wrap a short piece of masking tape around the rod until it is too thick for the bead to slide away.
Add small beads on the ends as hands. If they don’t stay on, use more masking tape.
Step 4 – Testing and troubleshooting
Here’s what to look for if the robot needs help walking:
Is the weight balanced on both sides?
Do the legs swing freely? (Loosen the beads if needed.)
Are any beads sliding around? (If so, use tape to keep them in place.)
Are the legs the same height? (Use tape to move the hole for the rod if needed.)
Is the mini craft stick “ski” in the best position? (See instructions above.)
Does it help to adjust the angle of the test ramp?
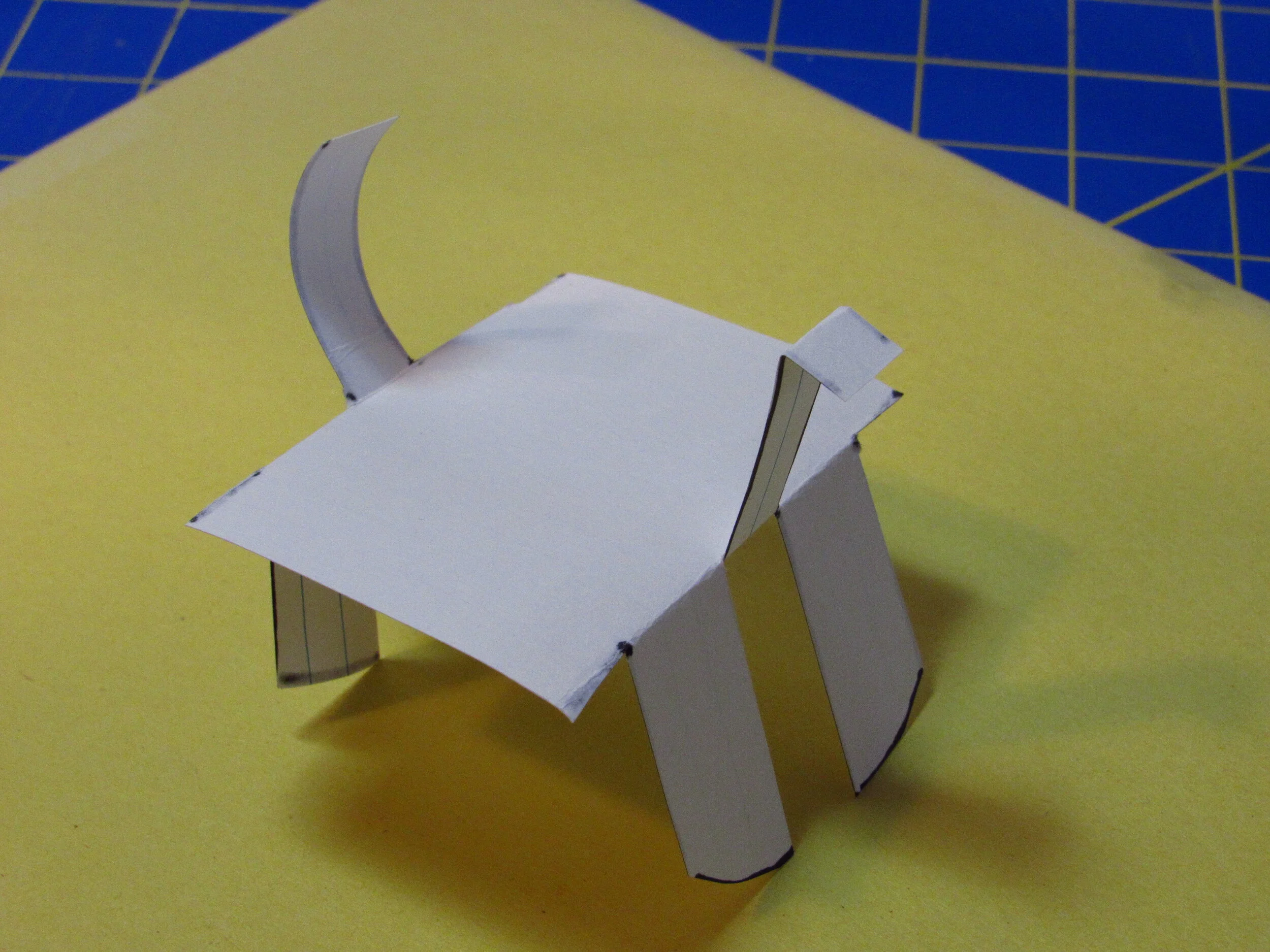
BONUS: Make a Walking Paper Robot Dog

This Walking Robot Dog is a four-legged version of a passive-dynamic walker. It was inspired by Spot, the robot dog from Boston Dynamics. Spot has a long neck that helps it grab things with its mouth.
Supplies
For the walking robot dog:
index card, cardstock, or construction paper
pen, pencil, or marker
scissors
optional:
ruler (or markings on strip of paper)
tape
2 paper clips
For the test ramp:
stiff cardboard or book — if it’s too smooth, cover with a piece of rough paper
something to prop up the ramp, like a pile of books
Instructions
Note: To see where to fold and where to cut, look at the template above.
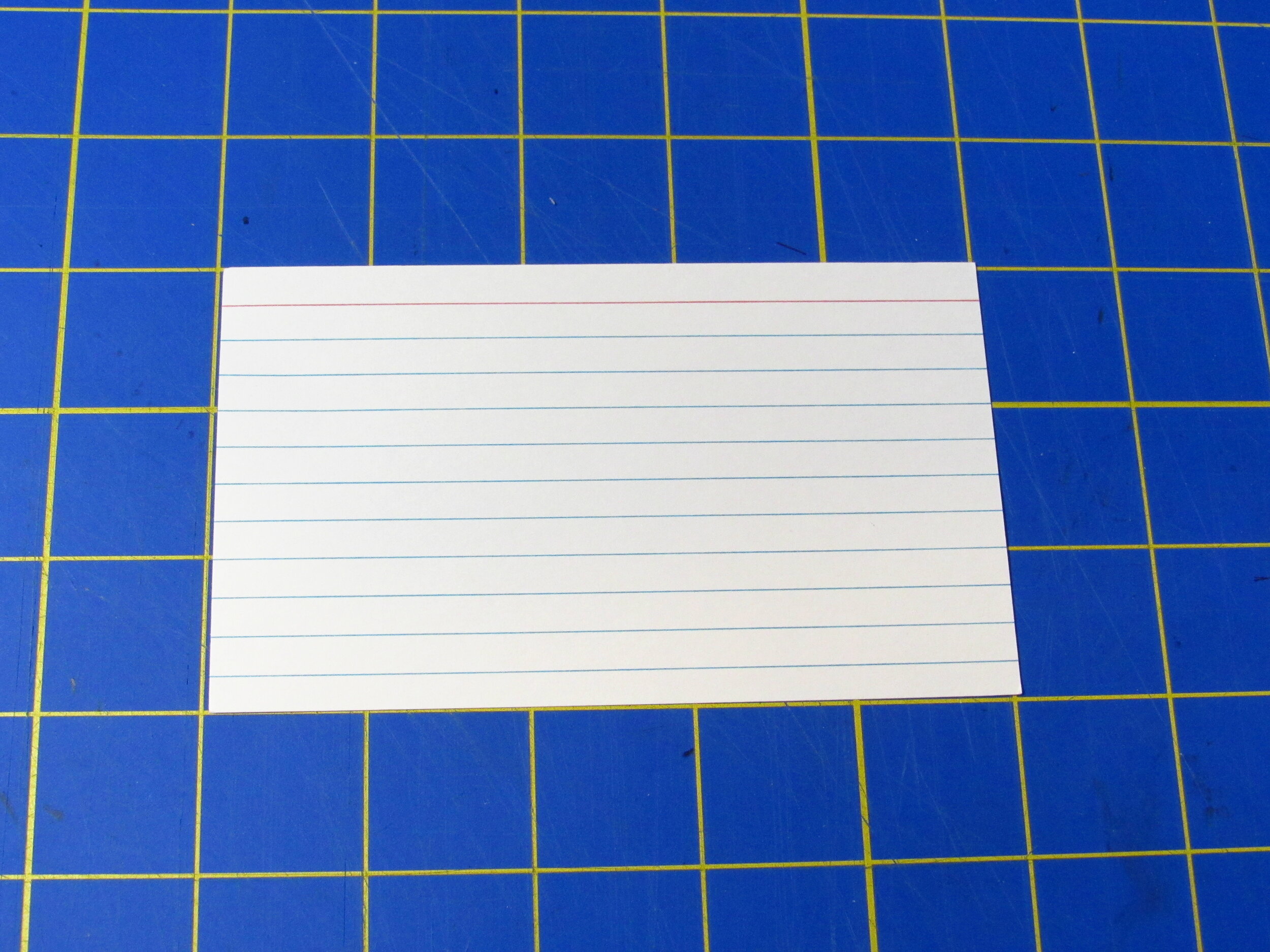
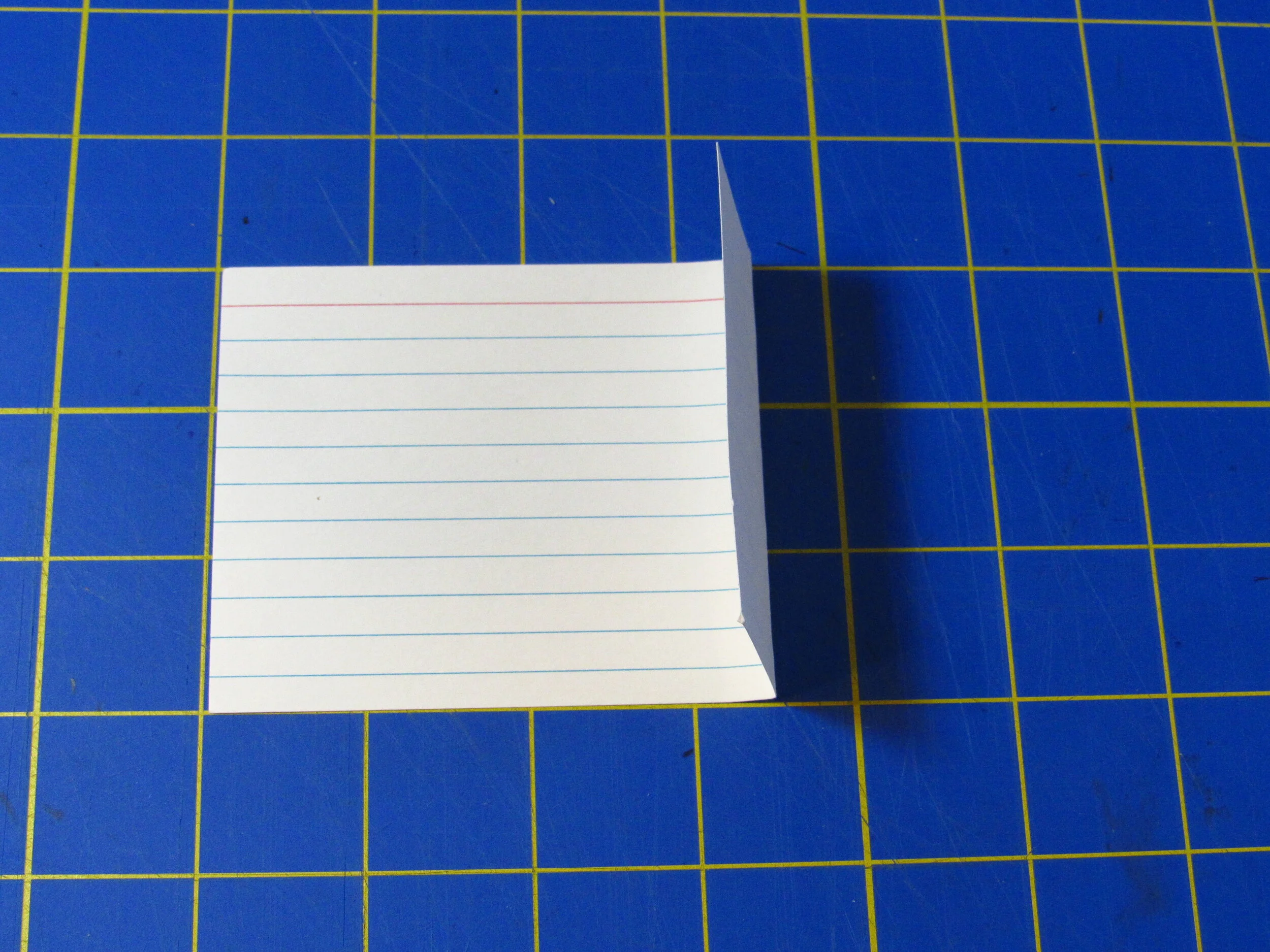
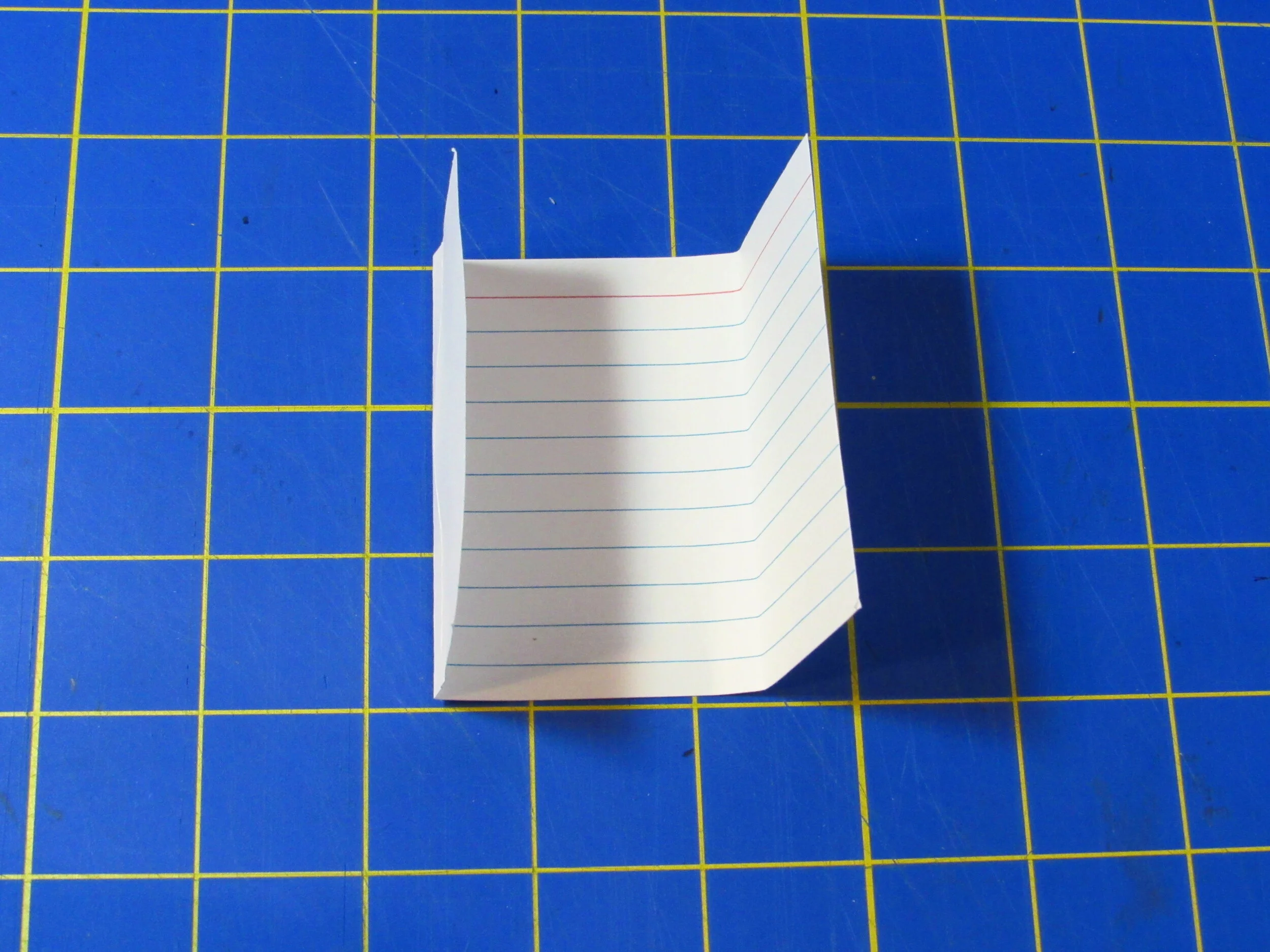
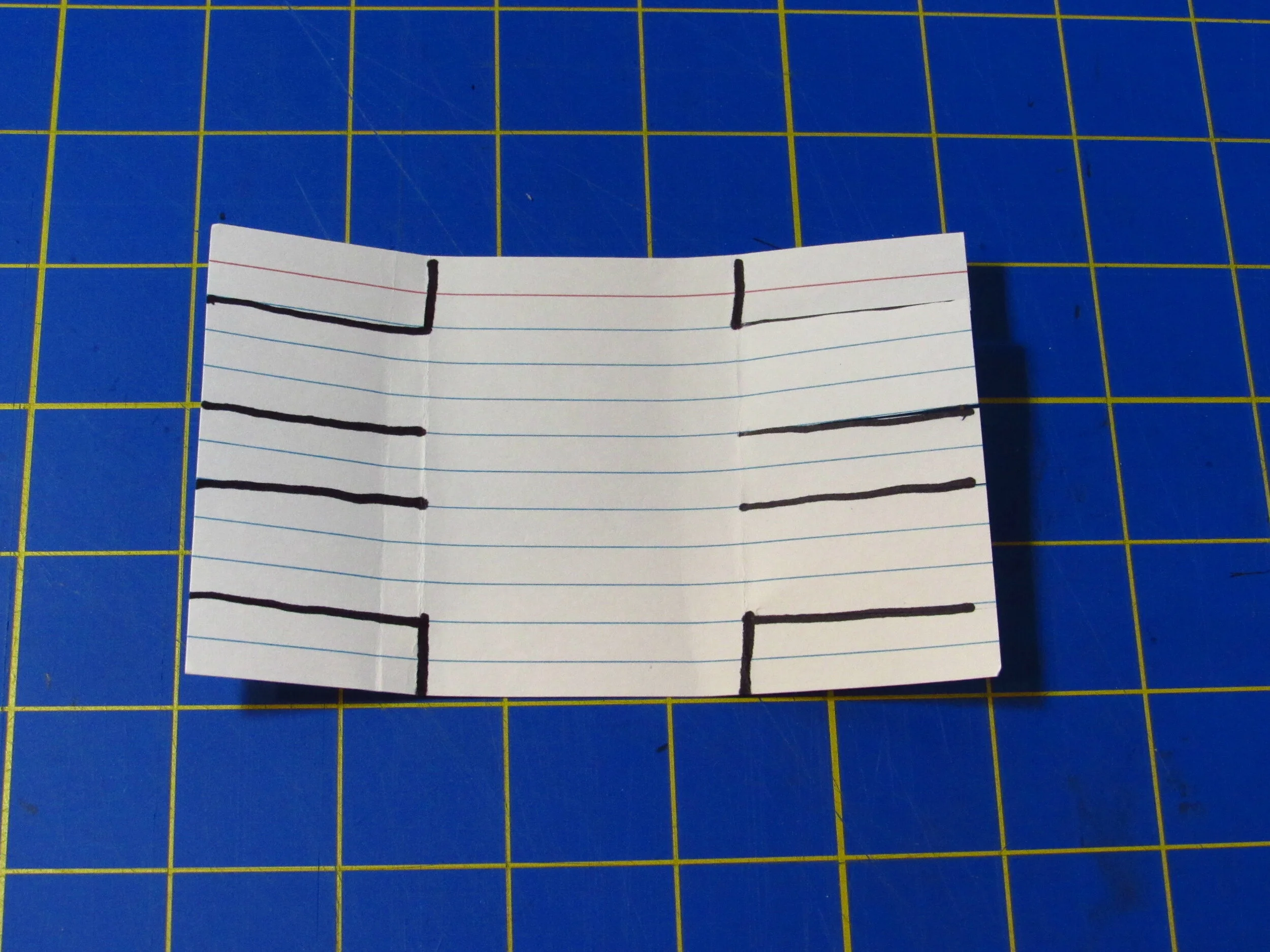
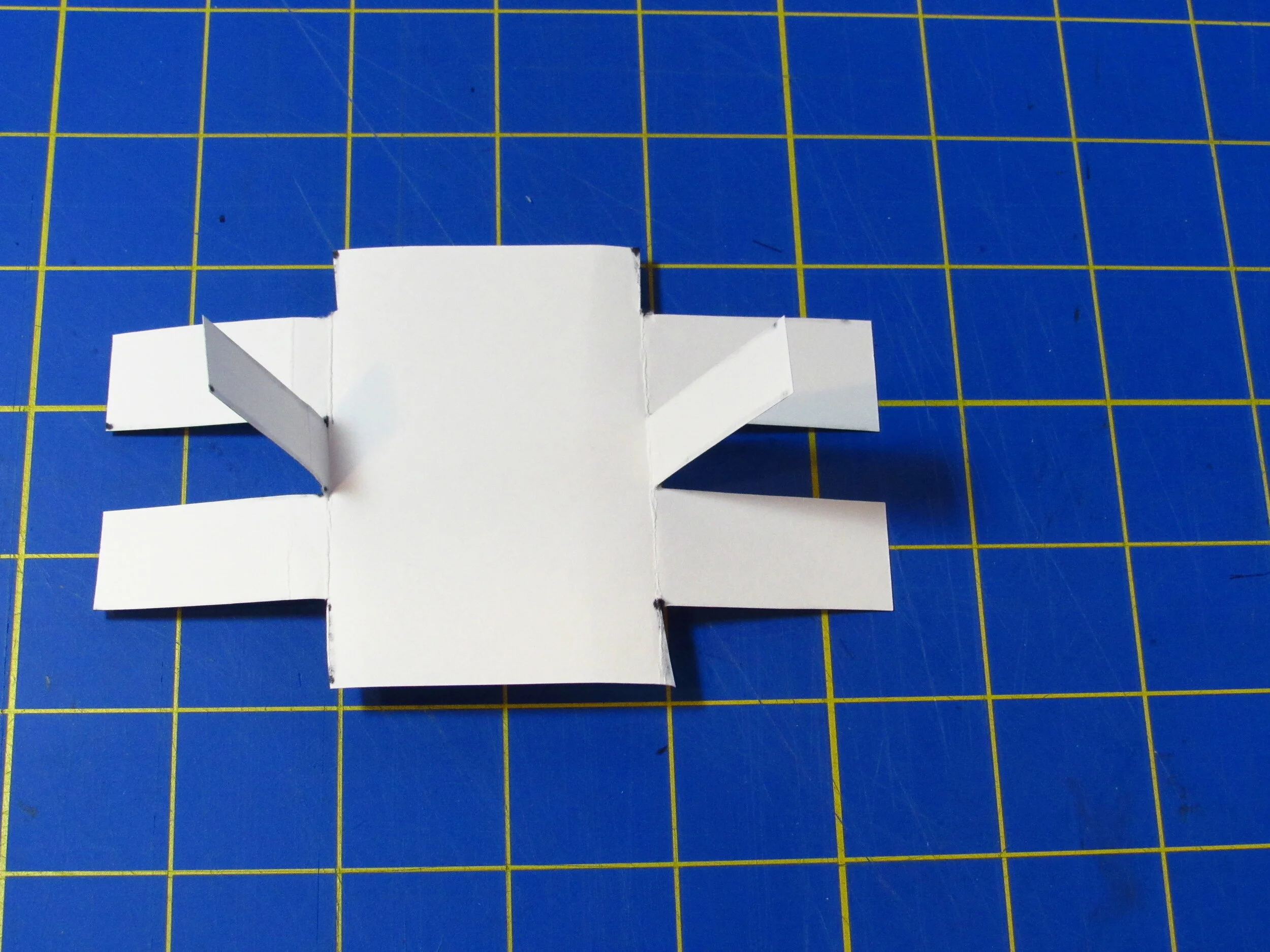
Make the legs. Take the index card and fold the ends up. The front and back leg sections should be equal. Unfold.
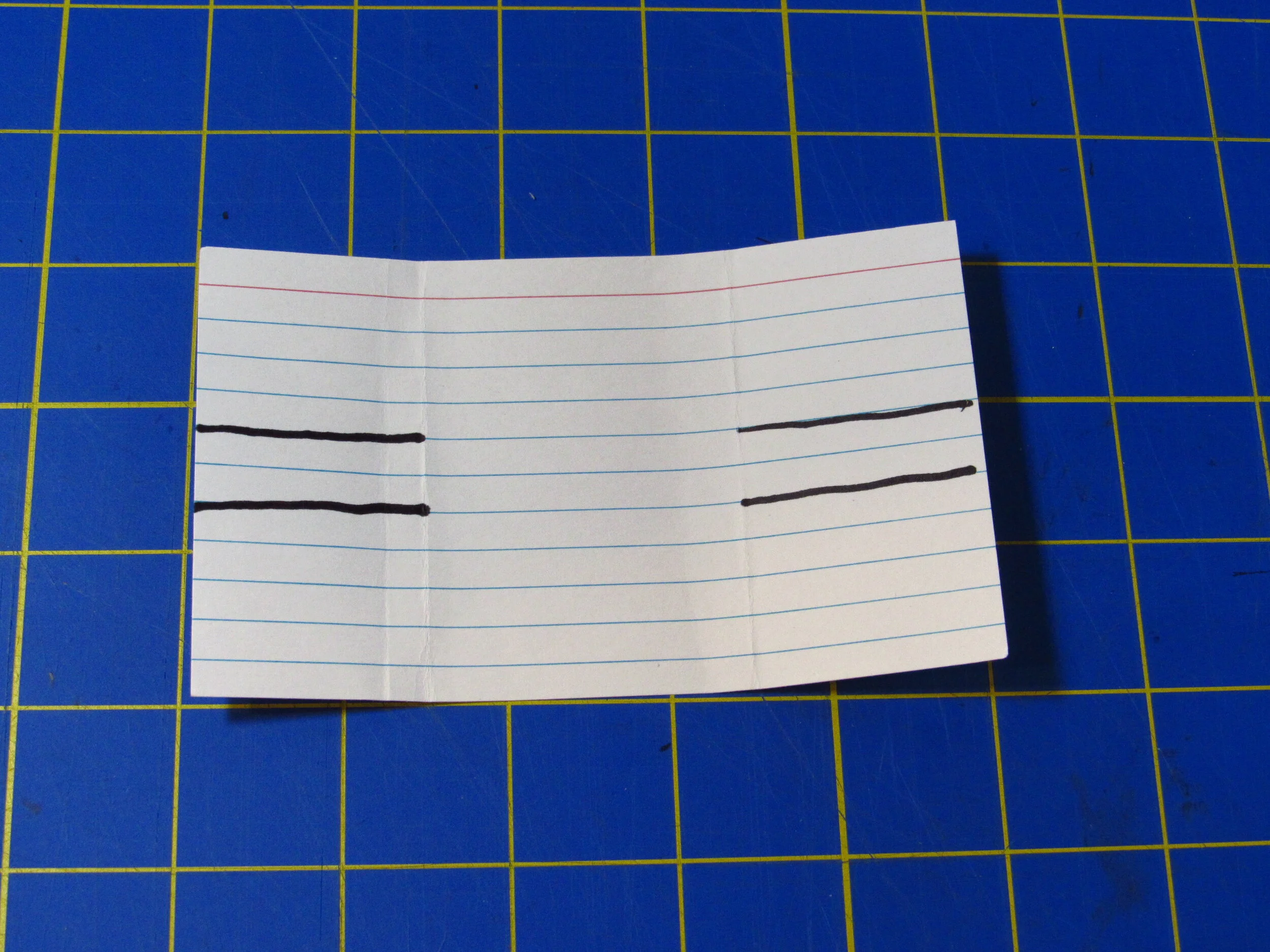
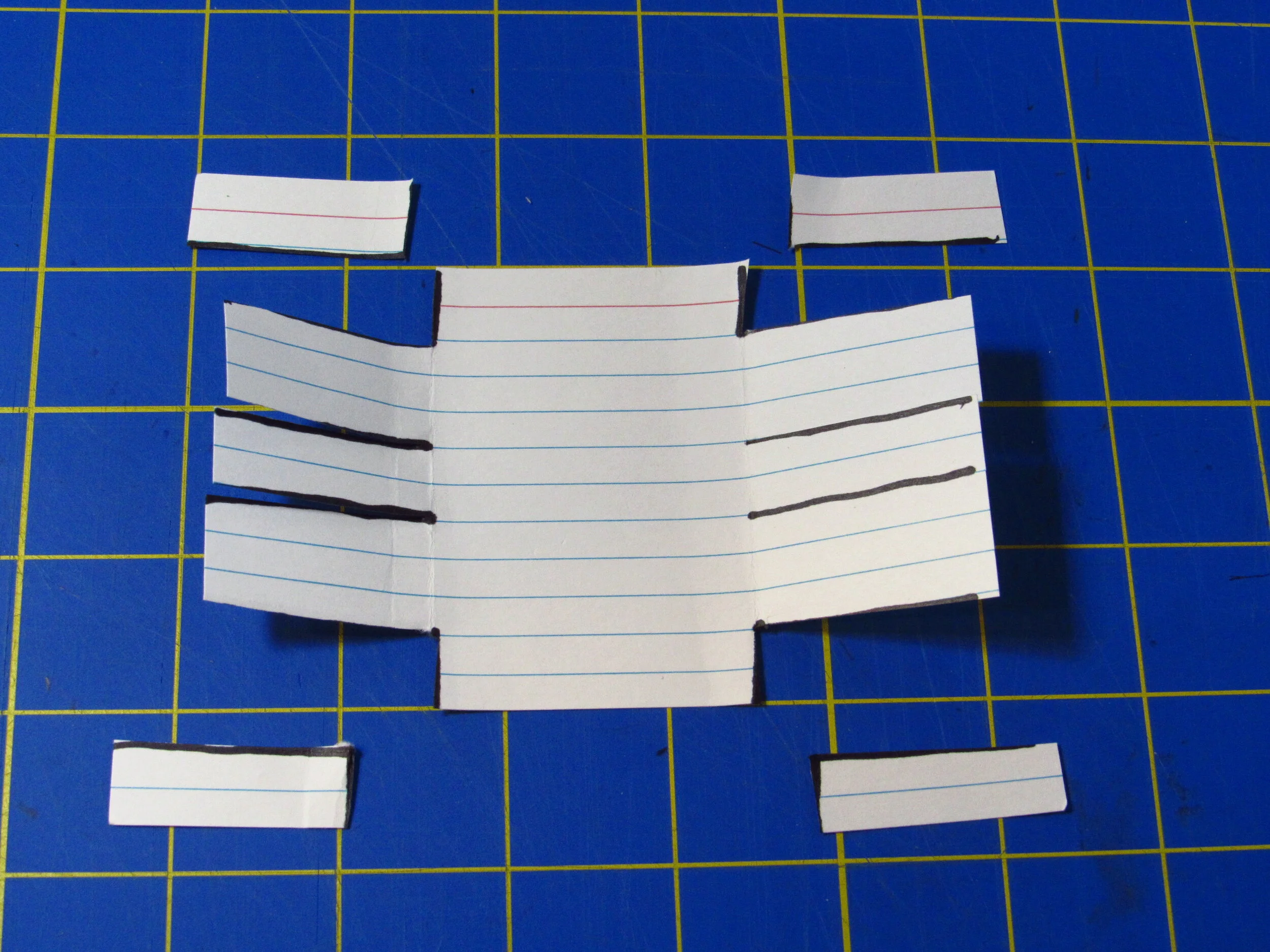
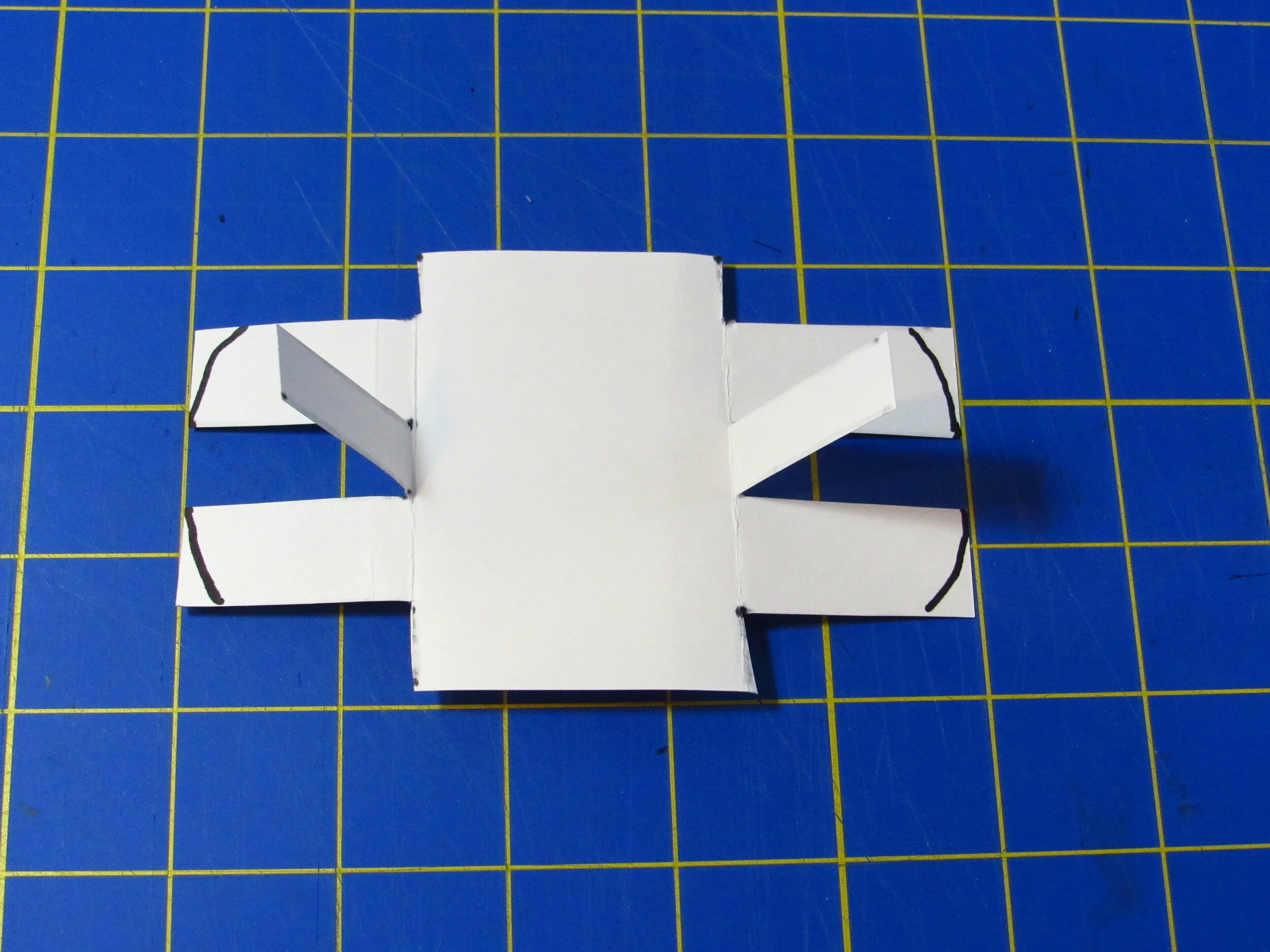
Make the head and tail. On each end, cut a narrow strip down the middle from the edge to the fold.
Cut the legs. Cut another strip on either side of the head and tail. Then cut along the fold until you reach the leg and remove the extra.
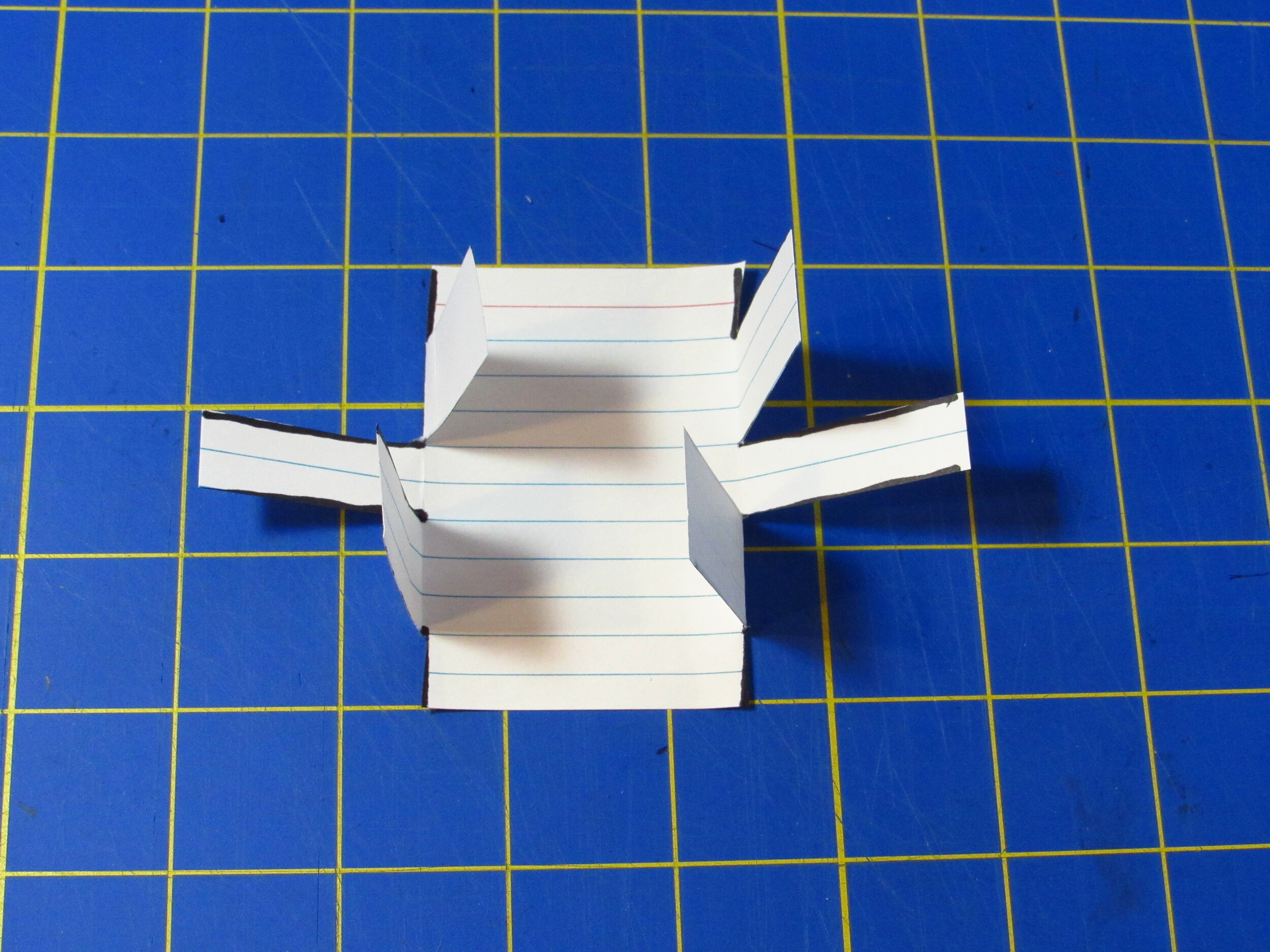
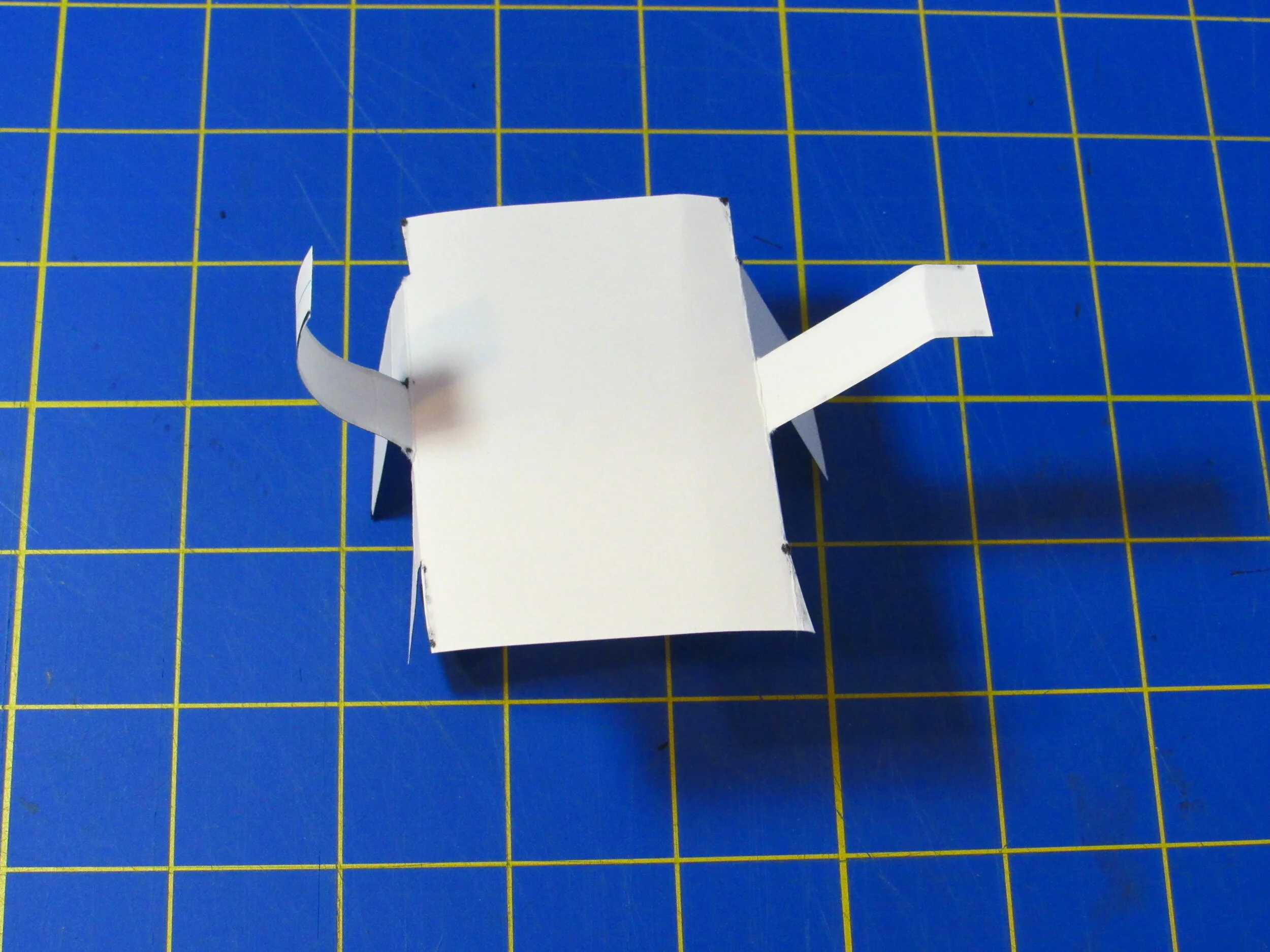
Bend the legs up.
Flip the card over.
Bend the neck up. Fold down the head. Curl the tail up.
Flatten the legs again.
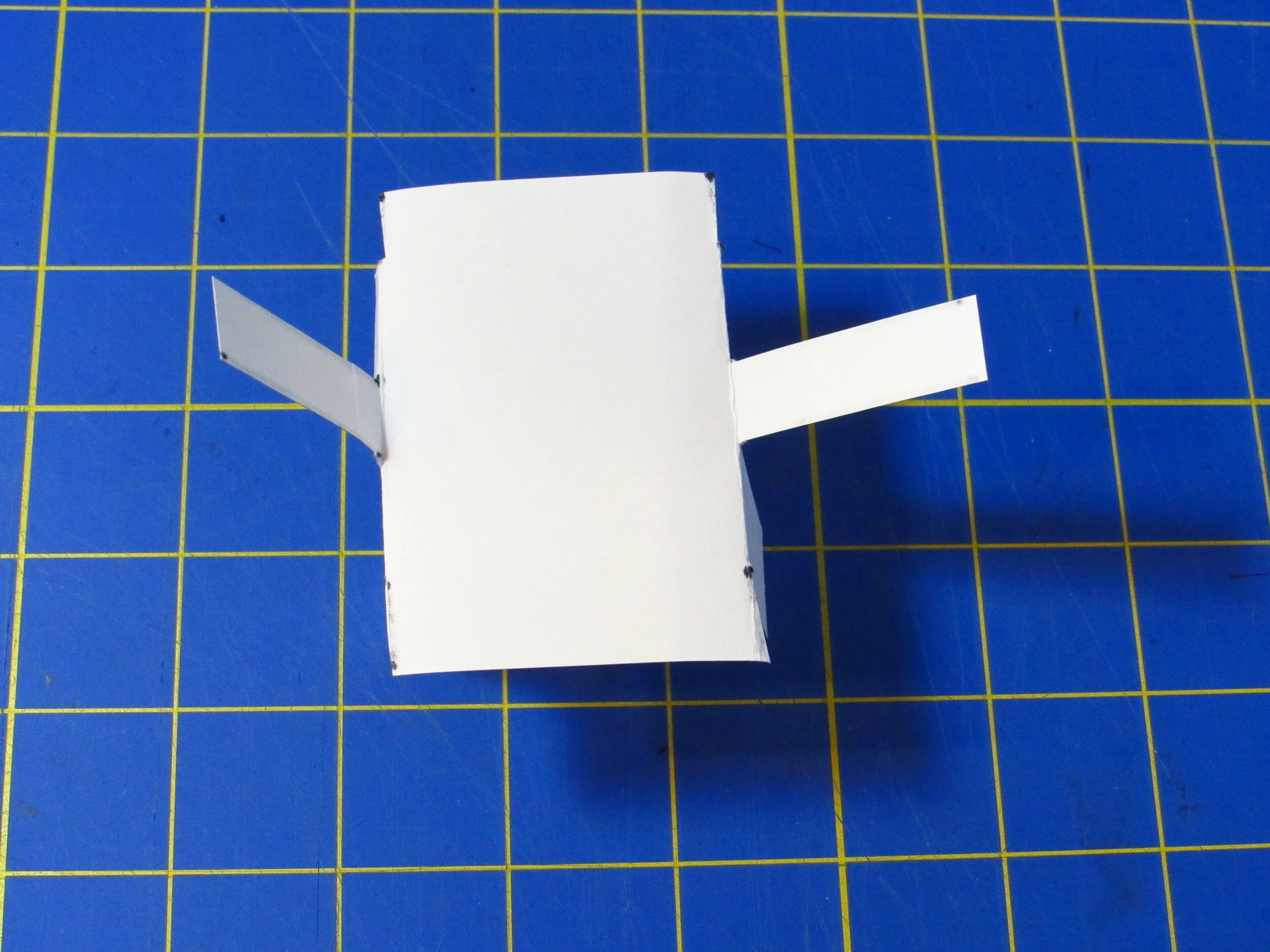
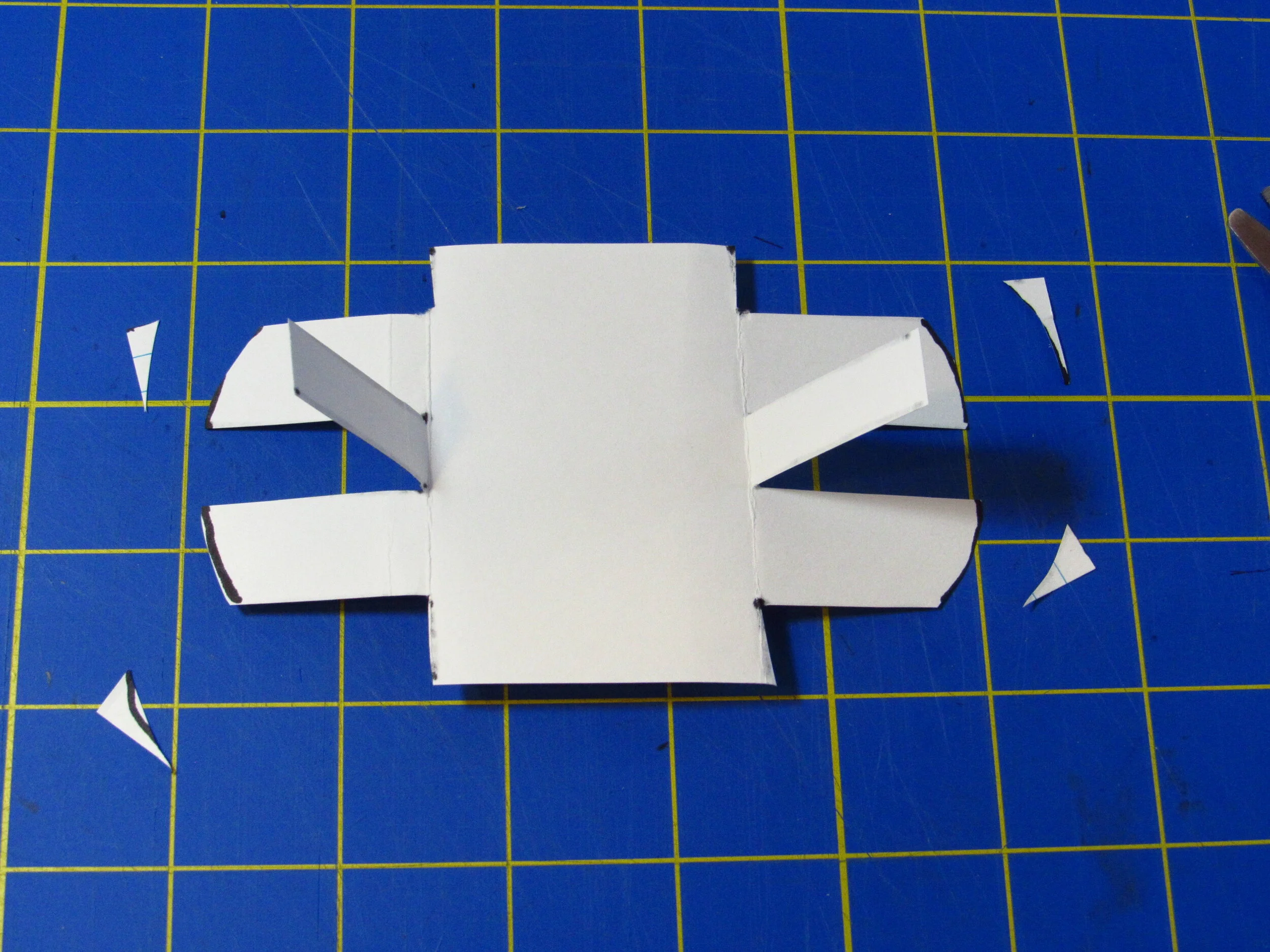
Round off the feet. To help the dog rock side to side and lift its feet to walk, trim each foot so the bottom curves up from the middle towards the outside.
Test the dog. Place it at the top of the ramp. Tilt the ramp until the dog starts to move.
Troubleshoot. If it doesn't work, what could be the problem? Look at:
Balance: Are front and back legs the same length?
Feet: Are they curved evenly?
Rocking: Does the dog tilt from side to side? If not, tape a paperclip under each side.
Body: Is it stiff enough? If not, make it thicker with tape, or more paper.
Ramp: Is it tilted enough or too much? Is it too slippery?
Want More Great STEAM Projects?

Check out my book BOTS! from Nomad Press
Look for more free activities you can do at home on my Projects page